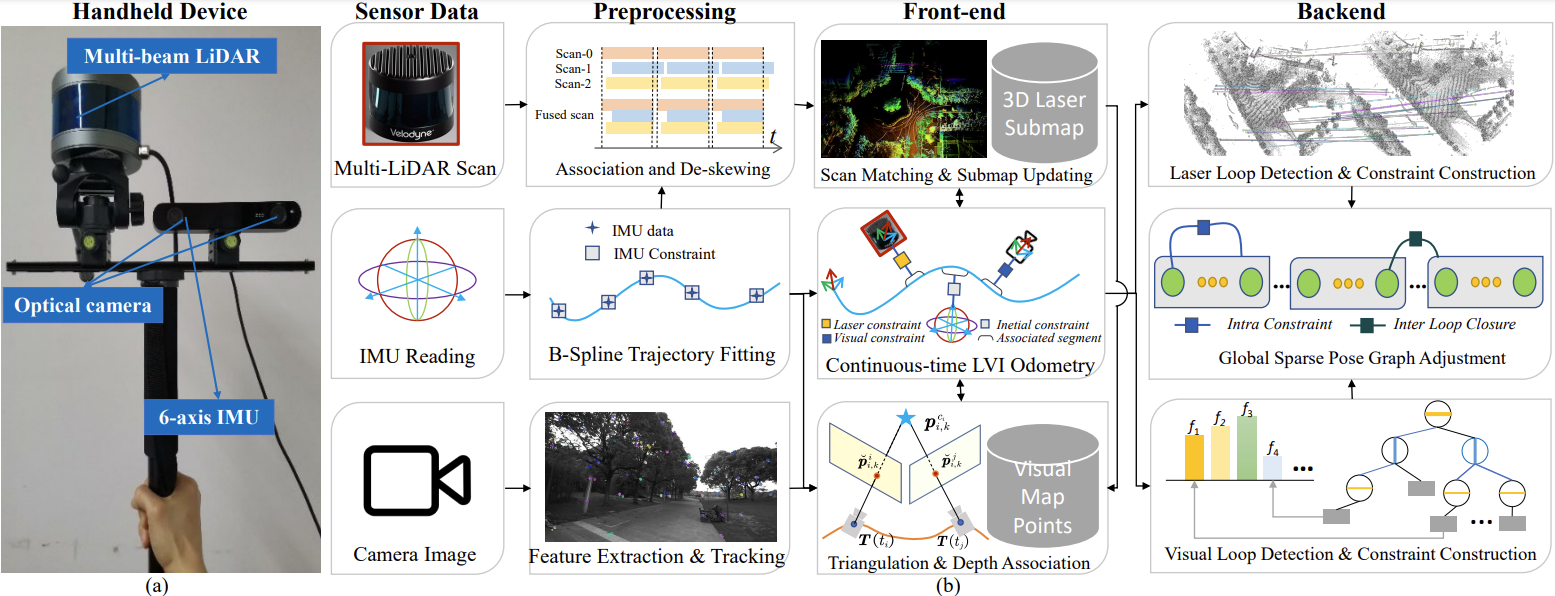
Ct-LVI: A Framework Towards Continuous-time Laser-Visual-Inertial Odometry and Mapping
Zhong Wang1, Lin Zhang1, Shengjie Zhao1, and Yicong Zhou2
1School of Software Engineering, Tongji University, Shanghai, China
2Department of Computer and Information Science, University of Macau, China
Introduction
This is the website for our paper "Ct-LVI: A Framework Towards Continuous-time Laser-Visual-Inertial Odometry and Mapping".
Source Codes
Demo Video
The following demo video shows the functionality and demonstrates the performance of our Ct-LVI.