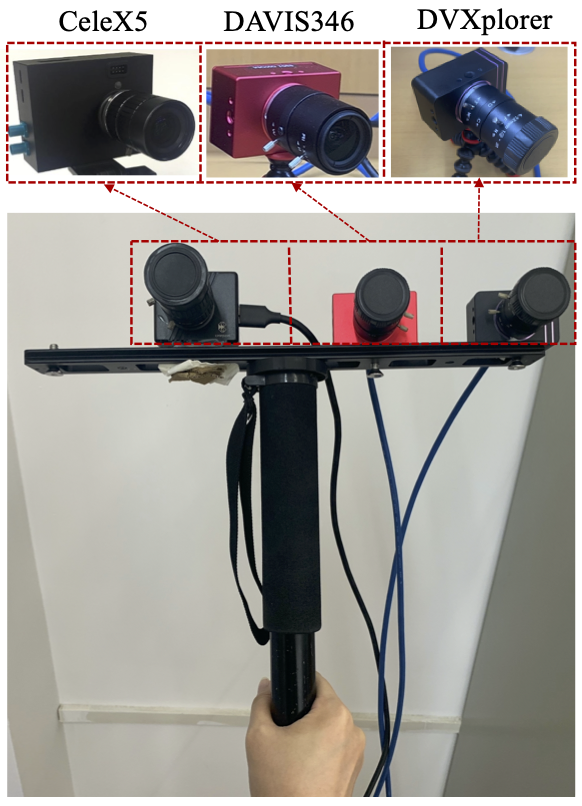
Event-Inertial-Camera Calibration and SLAM
Introduction (tutor: Yang Chen, 17715869227)
The tasks of this project are as follows:
1>Calibrate
the intrinsic and extrinsic parameters (IMU-Cam) of the Event-Inertial-Camera
sensor system.
2>Based
on the calibrated extrinsic parameters, achieve tightly coupled
Event-Inertial-Camera SLAM.
|
Requirements
Basic
Requirements:
1> The designed
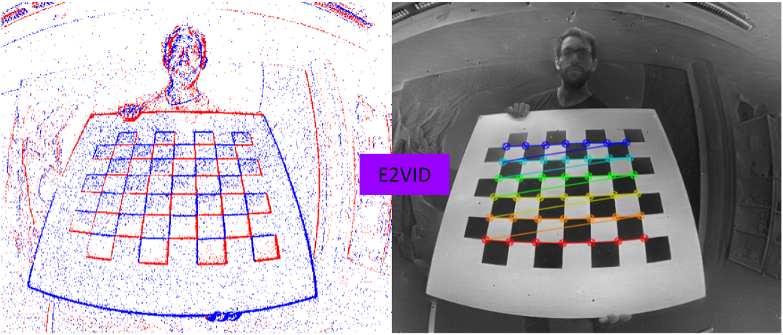
calibration module needs to support calibration of the event camera based on
reconstruction of event points
|
2> The designed
SLAM system should tightly couple event points, IMU information, and images for
pose estimation.
3> The
localization results should be stable, with no significant drift.
Advanced
Requirements:
4>
Optimizing the calibration process to achieve extrinsic calibration without
target.
5>
Visualizing the constructed map is encouraged.
6>
Integrating the calibration module into the SLAM system to establish an
automatic calibration-then-SLAM pipeline is encouraged.
Reference
Event-Camera
calibration: How to
Calibrate Your Event Camera.
Event-Inertial-Camera
SLAM: Ultimate SLAM? Combining
Events, Images, and IMU for Robust Visual SLAM in HDR and High Speed Scenarios.
Created on: Nov.
20, 2025