LiDAR-Inertial-Camera Calibration and SLAM (Tutor: Yunda SUN, wechat: syd17801034524)
1>Calibrate the extrinsic parameters of the LiDAR-Inertial-Camera sensor system.
2>Based on the calibrated extrinsic parameters, achieve tightly coupled LiDAR-Inertial-Camera SLAM.
1> The designed calibration module needs to support offline calibration without target.
|
|
|
3> The localization and mapping results should be stable, with no significant drift.
|
|
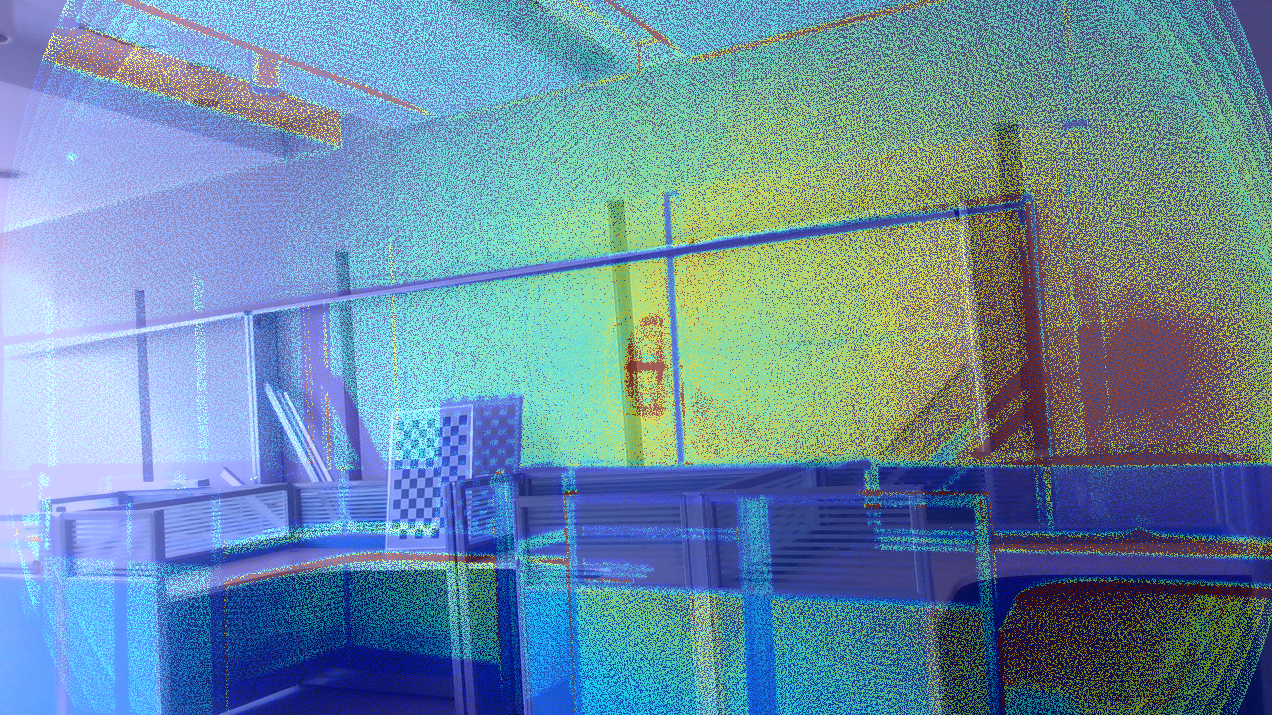
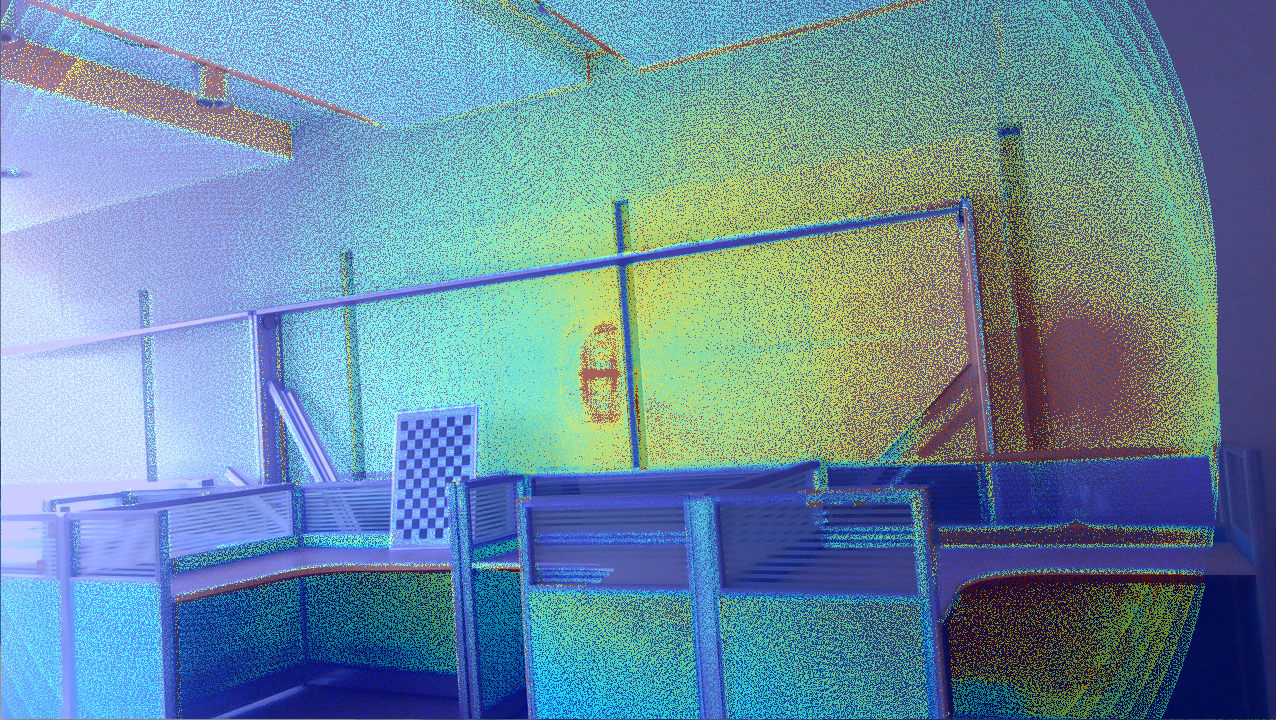
LiDAR-Camera calibration: Pixel-level Extrinsic Self Calibration of High Resolution LiDAR and Camera in Targetless Environments.
LiDAR-Inertial-Camera SLAM: A Robust, Real-time, RGB-colored, LiDAR-Inertial-Visual tightly-coupled state Estimation and mapping package.
Created on: Nov. 06, 2024