|
Vision-based Parking-slot Detection: A DCNN-based Approach and A Large-scale Benchmark Dataset Lin Zhang1, Junhao Huang1, Xiyuan Li1, and Lu Xiong2 1School of Software Engineering, Tongji University, Shanghai, China 2Intelligent Vehicle Institute, Tongji University, Shanghai, China |
Introduction
This is the website for our paper "Vision-based Parking-slot Detection: A DCNN-based Approach and A Large-scale Benchmark Dataset, IEEE Trans. Image Processing 27 (11) 5350-5364, 2018"
Tongji Parking-slot Dataset 2.0
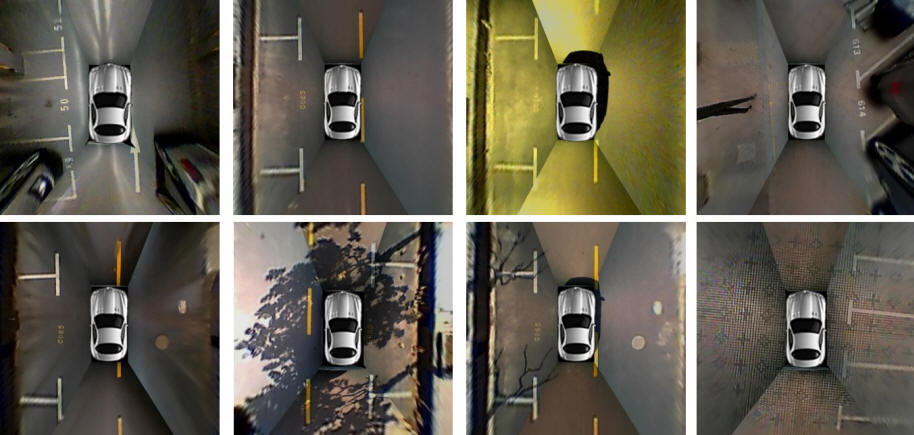
The images in this dataset were surround-view images synthesized from four low-cost fisheye cameras. Various parking-slot types were considered, including the vertical ones, the parallel ones, and the slant ones. When collecting outdoor samples, different illumination conditions and weather conditions were considered. Typical image samples contained in this dataset is shown below.
This dataset contains 9827 training images and 2338 test images. In order to test the performance of a parking-slot detection algorithm under different special conditions, test images are also grouped into 6 categories,
|
Subset |
Number of samples |
|
indoor parking lot |
226 |
|
outdoor normal daylight |
546 |
|
outdoor rainy |
244 |
|
outdoor shadow |
1127 |
|
outdoor street light |
147 |
|
outdoor slanted |
48 |
We have also developed a matlab labeling tool for labeling parking-slots on surround-view images, whose interface is shown in the image below.
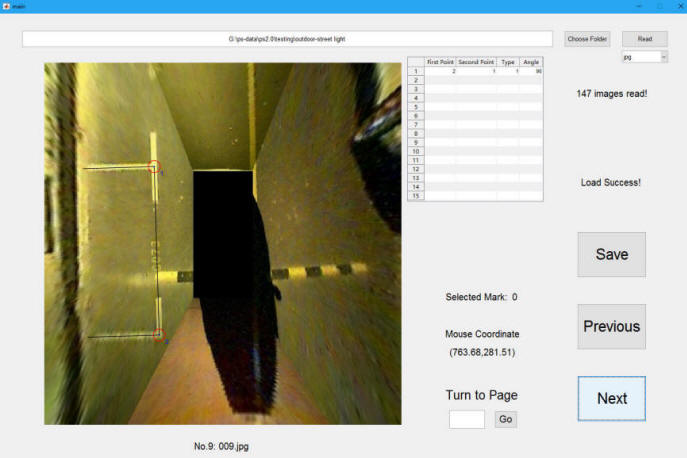
This labeling tool and the user instructions can be found here https://github.com/Teoge/MarkToolForParkingLotPoint.
Source Codes
Note: all these codes are implemented in Matlab and can only run on Win64 OS.
1. MarkingPointDetectionAndPerformanceMeasure.zip
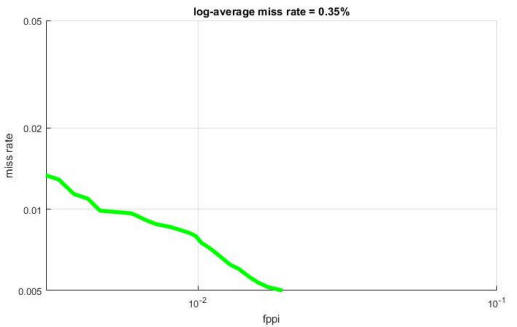
These codes can fulfill three tasks, detecting marking-points on given surround-view images, plotting the "missing rates VS FPPI" curve, and calculating the mean and stand deviation of localization errors. The figure below is the plot of "missing rates VS FPPI" achieved by our yolo-based marking-point detector. Its LAMR is 0.35%.
System configurations for running DeepPSDemo: Win10 64bit, Matlab2017a/b, CUDA8.0
This is the matlab version for DCNN-based parking-slot detection. The readme file is here.
The precision-recall rates of our parking-slot detection approach DeepPS on the test set of the dataset ps2.0 are summarized in the following table,
|
Subset |
Precision |
Recall |
|
indoor parking lot |
99.41% |
97.67% |
|
outdoor normal daylight |
99.49% |
99.23% |
|
outdoor rainy |
100% |
99.42% |
|
outdoor shadow |
99.86% |
99.28% |
|
outdoor street light |
100% |
100% |
|
outdoor slanted |
96.25% |
95.06% |
|
all |
99.54% |
98.89% |
Demo Videos
The following are two demo videos demonstrating the capability of our DeepPS approach for detecting parking-slots.
Last update: Nov. 23, 2018